ムービー
ムービー コントローラー
コントローラー


+ データを開く
データを開く

- 基本情報
基本情報
| 登録情報 |  | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
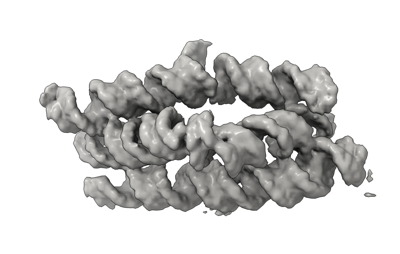
| タイトル | RNA origami 3-helix tile Traptamer | |||||||||||||||||||||
 マップデータ マップデータ | ||||||||||||||||||||||
 試料 試料 |
| |||||||||||||||||||||
 キーワード キーワード | Origami / aptamer / switch / sensor / toe-hold / robot / broccoli / RNA | |||||||||||||||||||||
| 生物種 | synthetic construct (人工物) | |||||||||||||||||||||
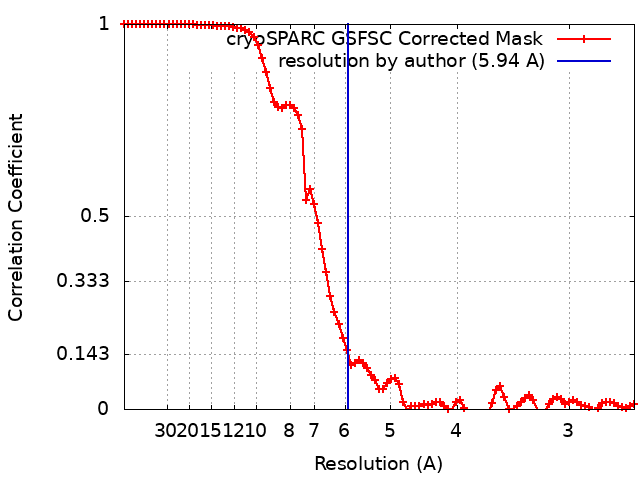
| 手法 | 単粒子再構成法 / クライオ電子顕微鏡法 / 解像度: 5.94 Å | |||||||||||||||||||||
 データ登録者 データ登録者 | McRae EKS / Vallina NS / Andersen ES | |||||||||||||||||||||
| 資金援助 | European Union,  デンマーク, デンマーク,  カナダ, 6件 カナダ, 6件
| |||||||||||||||||||||
 引用 引用 | ジャーナル: Sci Adv / 年: 2024 タイトル: An RNA origami robot that traps and releases a fluorescent aptamer. 著者: Néstor Sampedro Vallina / Ewan K S McRae / Cody Geary / Ebbe S Andersen /  要旨: RNA nanotechnology aims to use RNA as a programmable material to create self-assembling nanodevices for application in medicine and synthetic biology. The main challenge is to develop advanced RNA ...RNA nanotechnology aims to use RNA as a programmable material to create self-assembling nanodevices for application in medicine and synthetic biology. The main challenge is to develop advanced RNA robotic devices that both sense, compute, and actuate to obtain enhanced control over molecular processes. Here, we use the RNA origami method to prototype an RNA robotic device, named the "Traptamer," that mechanically traps the fluorescent aptamer, iSpinach. The Traptamer is shown to sense two RNA key strands, acts as a Boolean AND gate, and reversibly controls the fluorescence of the iSpinach aptamer. Cryo-electron microscopy of the closed Traptamer structure at 5.45-angstrom resolution reveals the mechanical mode of distortion of the iSpinach motif. Our study suggests a general approach to distorting RNA motifs and a path forward to build sophisticated RNA machines that through sensing, computing, and actuation modules can be used to precisely control RNA functionalities in cellular systems. | |||||||||||||||||||||
| 履歴 |
|
- 構造の表示
構造の表示
| 添付画像 |
|---|
- ダウンロードとリンク
ダウンロードとリンク
-EMDBアーカイブ
| マップデータ | emd_41656.map.gz | 31.4 MB |  EMDBマップデータ形式 EMDBマップデータ形式 | |
|---|---|---|---|---|
| ヘッダ (付随情報) | emd-41656-v30.xmlemd-41656.xml | 19 KB 19 KB | 表示 表示 | EMDBヘッダ |
| FSC (解像度算出) | emd_41656_fsc.xml | 9.6 KB | 表示 | FSCデータファイル |
| 画像 | 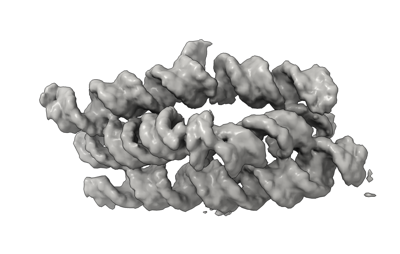 emd_41656.png emd_41656.png | 70 KB | ||
| マスクデータ | emd_41656_msk_1.map | 64 MB | マスクマップ | |
| Filedesc metadata | emd-41656.cif.gz | 5.5 KB | ||
| その他 | emd_41656_additional_1.map.gzemd_41656_half_map_1.map.gzemd_41656_half_map_2.map.gz | 57.5 MB 59.4 MB 59.4 MB | ||
| アーカイブディレクトリ |  http://ftp.pdbj.org/pub/emdb/structures/EMD-41656ftp://ftp.pdbj.org/pub/emdb/structures/EMD-41656 http://ftp.pdbj.org/pub/emdb/structures/EMD-41656ftp://ftp.pdbj.org/pub/emdb/structures/EMD-41656 | HTTPS FTP |
-関連構造データ

-リンク
| EMDBのページ | EMDB (EBI/PDBe) / EMDataResource |
|---|
-マップ
| ファイル | ダウンロード / ファイル: emd_41656.map.gz / 形式: CCP4 / 大きさ: 64 MB / タイプ: IMAGE STORED AS FLOATING POINT NUMBER (4 BYTES) | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ボクセルのサイズ | X=Y=Z: 1.294 Å | ||||||||||||||||||||
| 密度 |
| ||||||||||||||||||||
| 対称性 | 空間群: 1 | ||||||||||||||||||||
| 詳細 | EMDB XML:
|
-添付データ
-マスク #1
| ファイル | emd_41656_msk_1.map | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
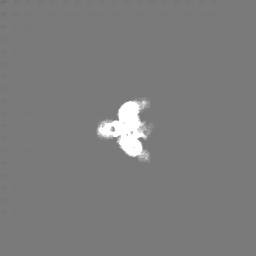
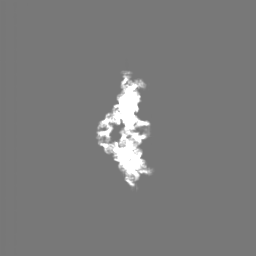
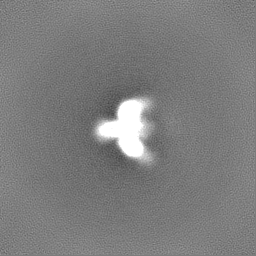
| 投影像・断面図 |
| ||||||||||||
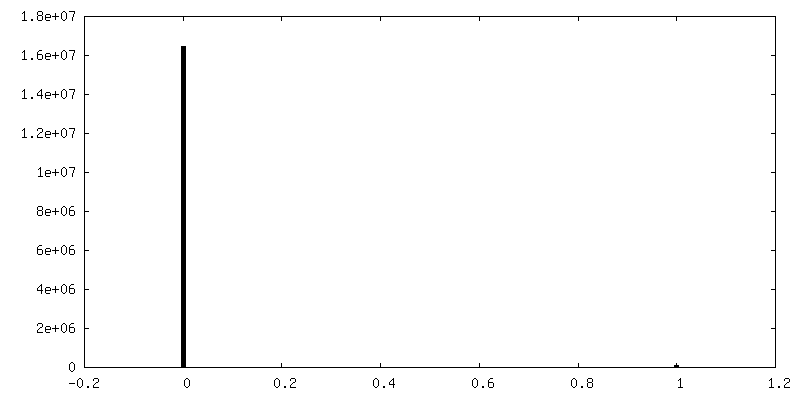
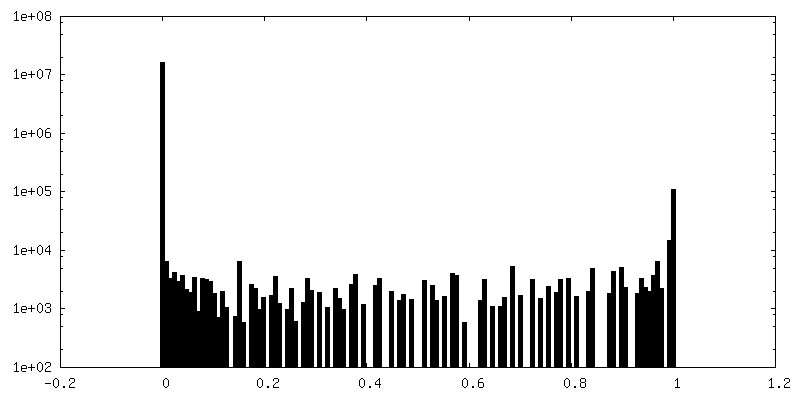
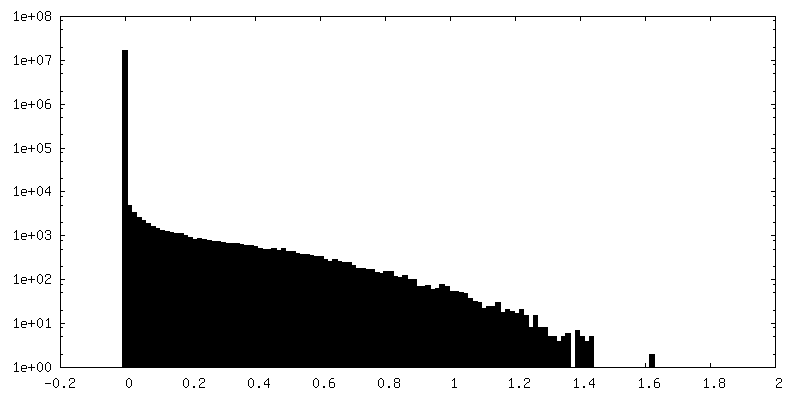
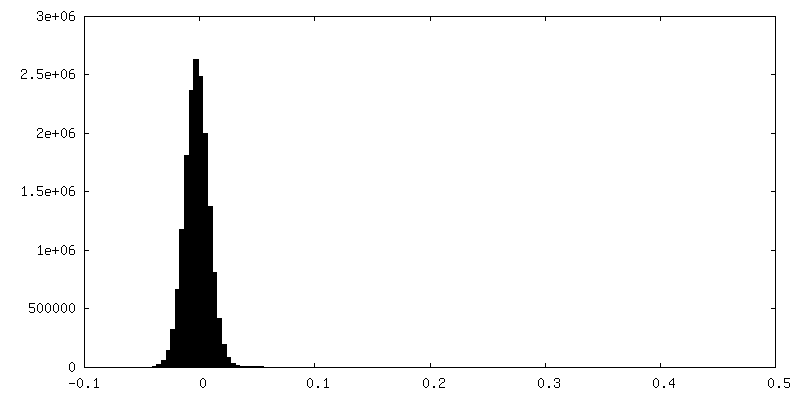
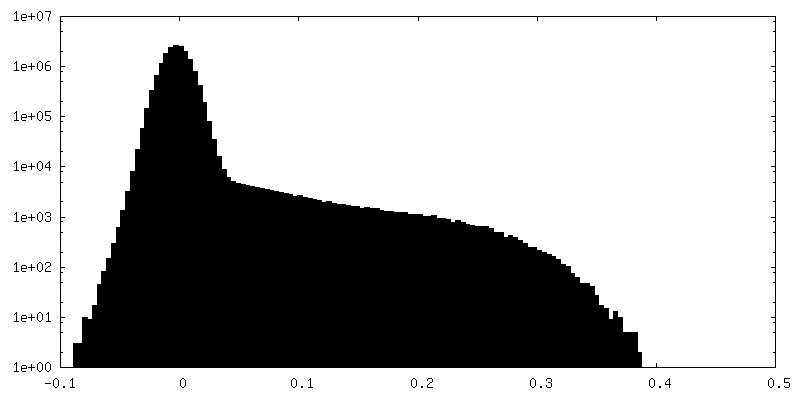
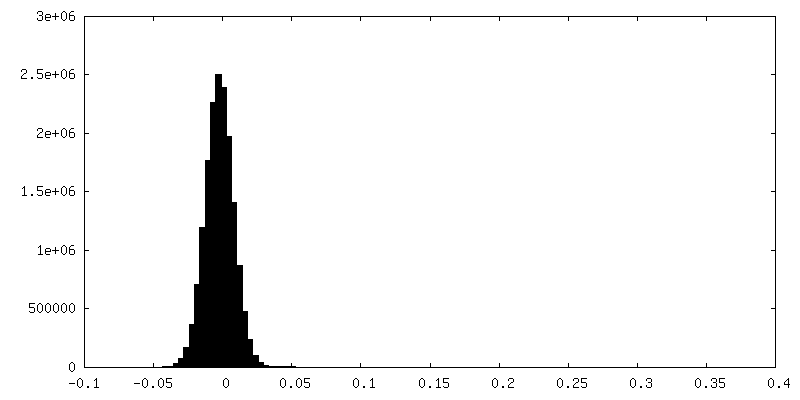
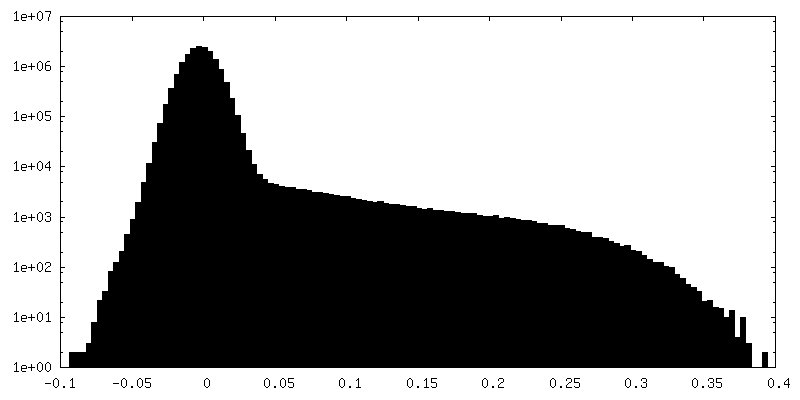
| 密度ヒストグラム |
 Z
Z Y
Y X
X







-追加マップ: #1
| ファイル | emd_41656_additional_1.map | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
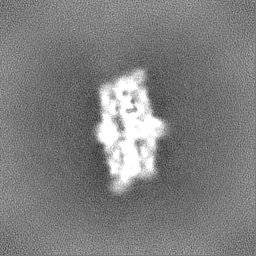
| 投影像・断面図 |
| ||||||||||||
| 密度ヒストグラム |

-ハーフマップ: #2
| ファイル | emd_41656_half_map_1.map | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
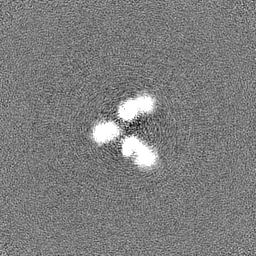
| 投影像・断面図 |
| ||||||||||||
| 密度ヒストグラム |


-ハーフマップ: #1
| ファイル | emd_41656_half_map_2.map | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 投影像・断面図 |
| ||||||||||||
| 密度ヒストグラム |


- 試料の構成要素
試料の構成要素
-全体 : 14-14 Traptamer
| 全体 | 名称: 14-14 Traptamer |
|---|---|
| 要素 |
|
-超分子 #1: 14-14 Traptamer
| 超分子 | 名称: 14-14 Traptamer / タイプ: complex / ID: 1 / 親要素: 0 / 含まれる分子: all 詳細: An RNA origami 3 helix tile with an inactive broccoli aptamer in the central helix. |
|---|---|
| 由来(天然) | 生物種: synthetic construct (人工物) |
-分子 #1: RNA (363-MER)
| 分子 | 名称: RNA (363-MER) / タイプ: rna / ID: 1 / コピー数: 1 |
|---|---|
| 由来(天然) | 生物種: synthetic construct (人工物) |
| 分子量 | 理論値: 116.977742 KDa |
| 配列 | 文字列: GGAAUCUCGC CCGAUGUUCG CAUCGGGAUU UGCAGGUCCA UGGAUUACAC CAUGCAACGC AGACCUGUAG AUGCCACGCU AGCCGUGGU GAGGGUCGGG UCCAGAUGUC AUUCGACUUU AACGCGCCUA AGCGUUGAAG GCGUGUUAGA GCAGAUAGUU C GCUAUCUG ...文字列: GGAAUCUCGC CCGAUGUUCG CAUCGGGAUU UGCAGGUCCA UGGAUUACAC CAUGCAACGC AGACCUGUAG AUGCCACGCU AGCCGUGGU GAGGGUCGGG UCCAGAUGUC AUUCGACUUU AACGCGCCUA AGCGUUGAAG GCGUGUUAGA GCAGAUAGUU C GCUAUCUG GGGAGCCUGU UCGCAGGCUC AGGAGCCUUC GGGCUCCUAG CGCUAUUACC CCGGACACCA CCGGGCAGAC AA GUAAUGG UGCUCCUCGA AUGACUUCUG UUGAGUAGAG UGUGGGCUCC GCGGCUAGUG UGCACCUUAG CGGUGAAUGU CUG ACACCG UUAAGGUGGU UACUCUUCGG AGUAACGCCG AGAUUCC |
-実験情報
-構造解析
| 手法 | クライオ電子顕微鏡法 |
|---|---|
 解析 解析 | 単粒子再構成法 |
| 試料の集合状態 | particle |
-試料調製
| 濃度 | 2 mg/mL | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 緩衝液 | pH: 7.5 構成要素:
| ||||||||||||
| グリッド | 材質: GOLD / メッシュ: 300 / 支持フィルム - 材質: GOLD / 支持フィルム - トポロジー: HOLEY / 前処理 - タイプ: GLOW DISCHARGE / 前処理 - 時間: 45 sec. / 前処理 - 雰囲気: AIR / 詳細: 15mA | ||||||||||||
| 凍結 | 凍結剤: ETHANE / チャンバー内湿度: 100 % / チャンバー内温度: 294 K / 装置: LEICA EM GP / 詳細: Protochips Au-Flat 1.2/1.3 grids.. |
- 電子顕微鏡法
電子顕微鏡法
| 顕微鏡 | FEI TITAN KRIOS |
|---|---|
| 特殊光学系 | エネルギーフィルター - 名称: GIF Bioquantum / エネルギーフィルター - スリット幅: 20 eV |
| 撮影 | フィルム・検出器のモデル: GATAN K3 BIOQUANTUM (6k x 4k) 撮影したグリッド数: 1 / 平均電子線量: 60.0 e/Å2 / 詳細: Pixel size of 0.645 A/px |
| 電子線 | 加速電圧: 300 kV / 電子線源:  FIELD EMISSION GUN FIELD EMISSION GUN |
| 電子光学系 | C2レンズ絞り径: 70.0 µm / 照射モード: FLOOD BEAM / 撮影モード: BRIGHT FIELD / Cs: 2.7 mm / 最大 デフォーカス(公称値): 2.0 µm / 最小 デフォーカス(公称値): 0.5 µm |
| 実験機器 |  モデル: Titan Krios / 画像提供: FEI Company |